
Im Rahmen des Master-Studiums an der HS Regensburg (Hochschule Regensburg) wurde im Modul „Höhere Software Engineering Projekte“ (HSP) eine Virtuelle Integrationsumgebung für den Test von Fahrzeugsteuerungen entwickelt. In einer Zeit, in der autonomes Fahren noch in der frühen Forschungsphase steckte, war das Ziel unserer Gruppe, eine preiswerte und flexible Simulationsumgebung zur Generierung synthetischer Sensordaten zu schaffen.
Der Simulator
Basierend auf der Open-Source Irrlicht Engine (einer 3D-Bibliothek für C++) entwickelten wir einen modularen Simulator, der physikalische Fahrzeugdynamik mit einer virtuellen Welt verknüpft.
- Physik-Engine: Modellierung von Fahrverhalten, Lenksystem (Ackermann-Geometrie) und Bremssystem (PT1-Glied für Ansprechverzögerungen).
- Modulare Sensorik: Unterstützung für Laserscanner, Ultraschallsensoren und Kameras.
- Konfiguration: Szenarien und Parameter wurden dynamisch über XML- und INI-Dateien geladen, was Tests ohne Neukompilierung ermöglichte.
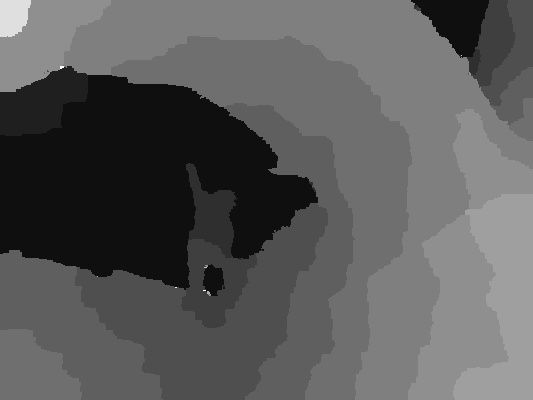
Tiefenmessung mittels Stereo-Kameras (Depthmap)
Mein persönlicher Fokus lag auf der Untersuchung von Stereo-Vision-Systemen zur Hinderniserkennung. Die Herausforderung bestand darin, aus zwei zweidimensionalen Kamerabildern (links/rechts) eine dreidimensionale Tiefenkarte (Depthmap) zu berechnen.
Mathematische Grundlagen
Die Bestimmung der Entfernung $X$ eines Objekts basiert auf der Triangulation. Wesentliche Faktoren sind die Basis $B$ (Abstand zwischen den Kameras) und die Brennweite $f$:
$$X = \frac{B \cdot f}{D}$$
Hierbei ist $D$ die Deviation (Disparität), also der Versatz der Bildpunkte zwischen den beiden Aufnahmen. In der Präsentation wurde hergeleitet, dass für eine menschengerechte anaglyphe Darstellung (Rot-Cyan-Brille) eine maximale Deviation von 1,2 mm im finalen Bild nicht überschritten werden darf, um visuelle Belastungen zu vermeiden.
Implementierung im Simulator
Technisch wurde dies durch Render-to-Texture (RTT) realisiert:
- Der Simulator rendert die Szene aus zwei leicht versetzten Kamerapositionen.
- Aus diesen Texturen wurde algorithmisch die Disparität ermittelt.
- Das Ergebnis ist eine Depthmap, in der Helligkeitswerte die Entfernung der Objekte repräsentieren – eine essenzielle Information für nachgelagerte Funktionen wie Notbremsassistenten.
Fazit und Relevanz
Das Projekt demonstrierte eindrucksvoll die Möglichkeiten virtueller Testszenarien. Wir konnten zeigen, dass durch Simulationen wie die unsere die Entwicklungskosten für Sensoralgorithmen drastisch gesenkt werden können, da kritische Szenarien (z. B. Kollisionsgefahr) gefahrlos und reproduzierbar durchgespielt werden können.